픽셀호크 프로
특징:
Pixhawk PRO는 최신 공식 ardupilot 펌웨어 및 PX4 펌웨어를 지원합니다.
1. 고급 32 비트 ARM CortexM4 고성능 프로세서 (2MB 플래시) 는 NuttX RTOS 실시간 운영 체제를 실행할 수 있습니다.
2. 14 PWM/서보 출력;
3. 버스 인터페이스 (UART, I2C, SPI, CAN);
4. 통합 백업 전원 및 백업 컨트롤러가 고장 나면 기본 컨트롤러가 백업 컨트롤로 넘어 가서 안전합니다.
5. 자동 및 수동 모드 제공;
6. 중복 전원 입력 및 페일오버 제공;
7. 여러 가지 빛깔의 LED 조명;
8. 멀티 톤 버저 인터페이스 제공
9. 마이크로 SD 기록 비행 데이터;
10.TYPE-C USB 포트
11.GH1.25 포트
사양:
인터페이스
하드웨어 흐름 제어 기능을 갖춘 1.5 고전압 호환 UART 1, 2
2. 2 수
3.Spektrum DSM / DSM2 / DSM-X 위성 수신기 호환 입력
4. 후타바 SBUS 호환 입력 및 출력
5.PPM 신호 입력
6.RSSI (PWM 또는 전압) 입력
7.I2C
8.SPI
9.3.3 및 6.6VADC 입력
10. 외부 TYPEC USB 인터페이스




M9N GPS 모듈
M9N 은 다음과 같은 특성과 용도를 가진 무인 공중 차량에 일반적으로 사용되는 GPS 모듈입니다.
고정밀 위치: M9N 은 고급 GNSS 기술을 채택하고 여러 위성 항법 시스템을 지원하며 고정밀 위치 위치 정보를 제공 할 수 있습니다. 무인 공중 차량의 경우 정확한 위치 및 항법을 달성 할 수 있습니다.
멀티 시스템 지원: M9N 은 GPS, GLONASS, Galileo, BeiDou 등을 포함한 여러 위성 내비게이션 시스템을 지원합니다. 이를 통해 드론은 여러 위성 신호를 동시에 수신하여 위치 정확도와 신뢰성을 향상시킬 수 있습니다.
빠른 위치 지정: M9N 은 빠른 콜드 스타트 및 핫 스타트 시간을 가지므로 위성 신호를 빠르게 얻고 포지셔닝을 수행 할 수있어 무인 항공기의 빠른 이륙 및 작업 실행에 중요합니다.
M9N 은 더 높은 정확도, 더 빠른 검색 속도 및 더 나은 안정성으로 더 많은 위성을 야외에서 검색 할 수 있습니다. (별 검색의 특정 수는 당시 환경에 따라 결정됩니다.)
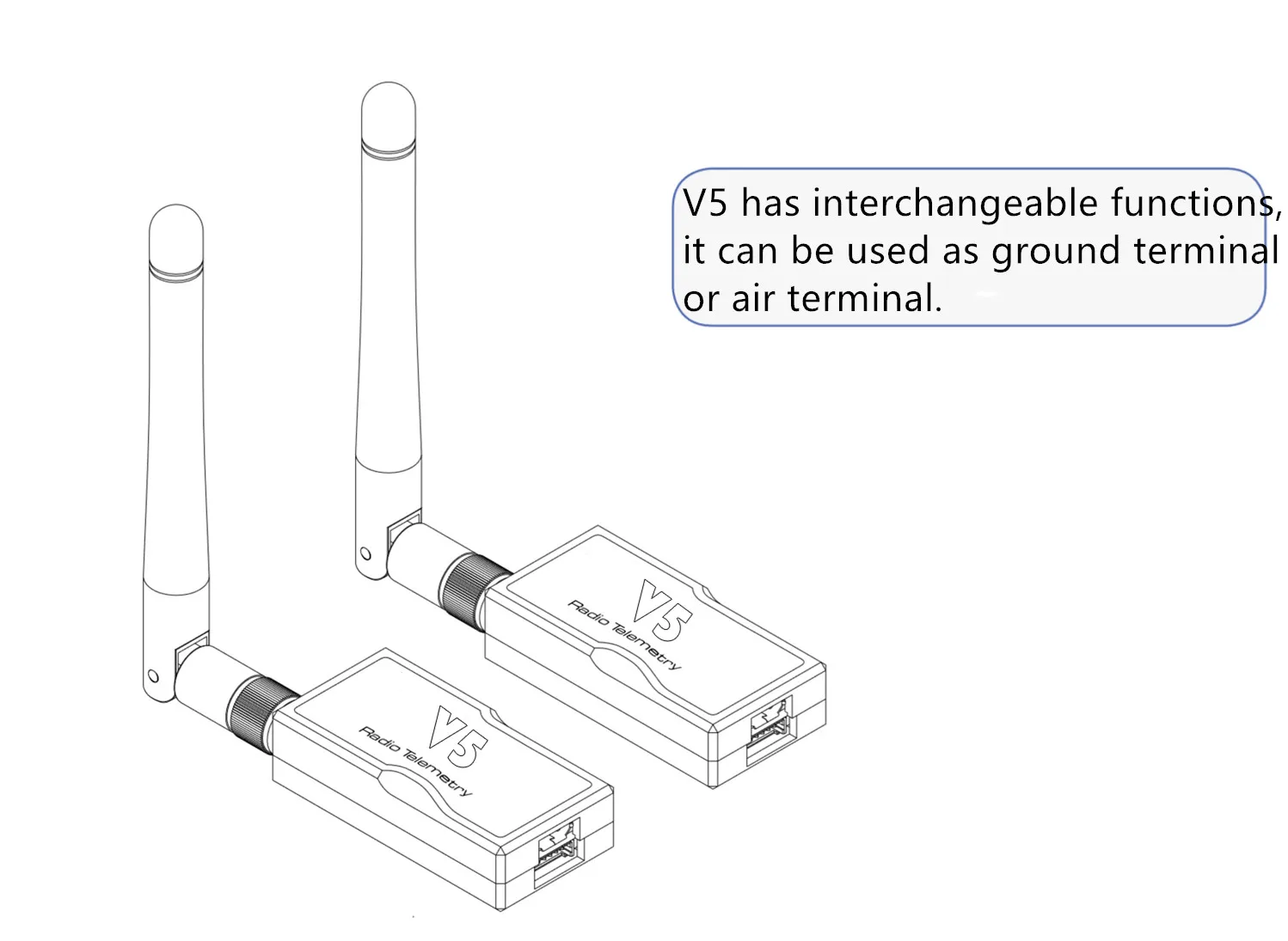
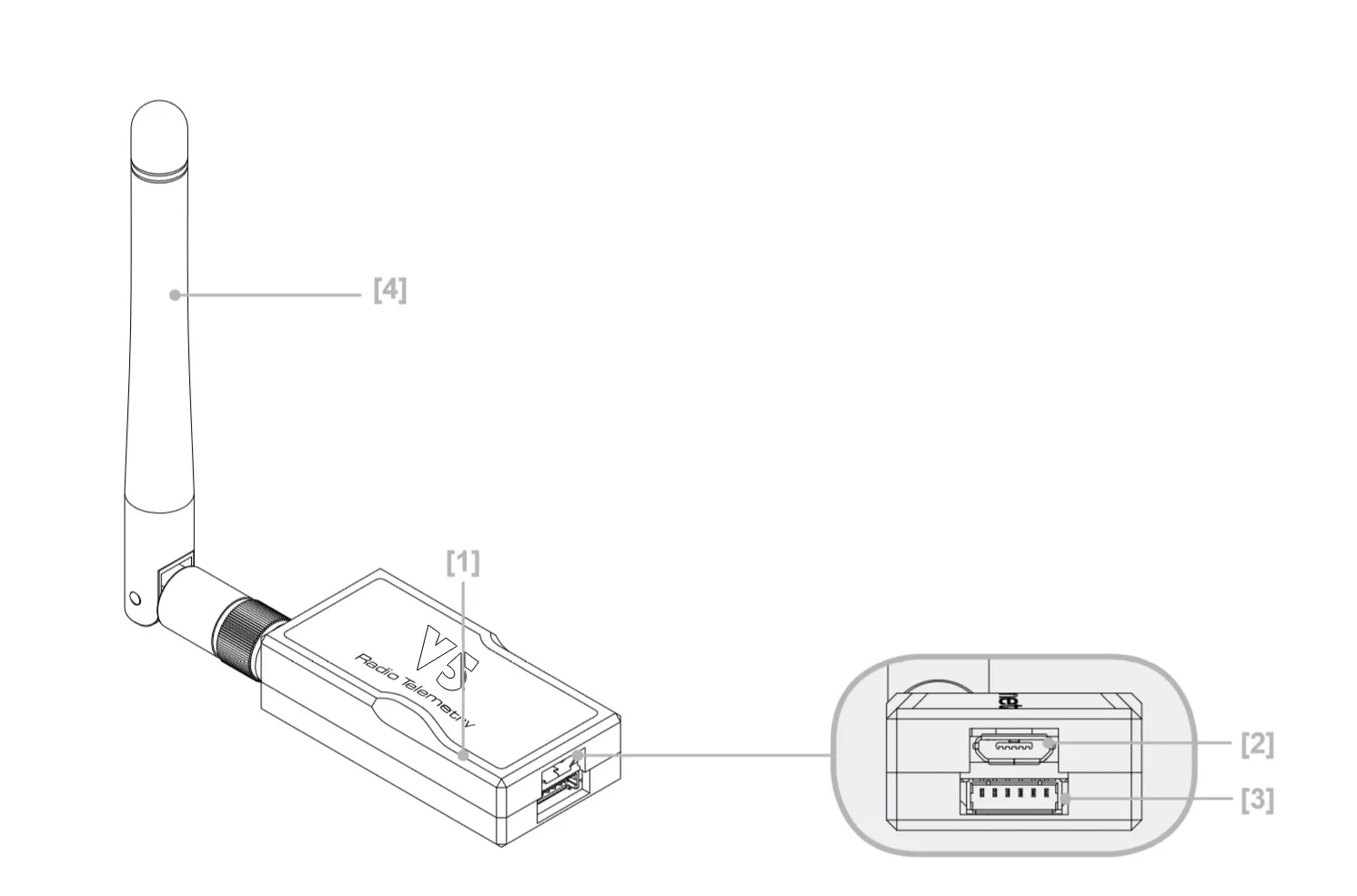
무선 원격 측정은 pixhawk와 컴퓨터 또는 휴대 전화 간의 무선 통신에 사용될 수 있습니다.
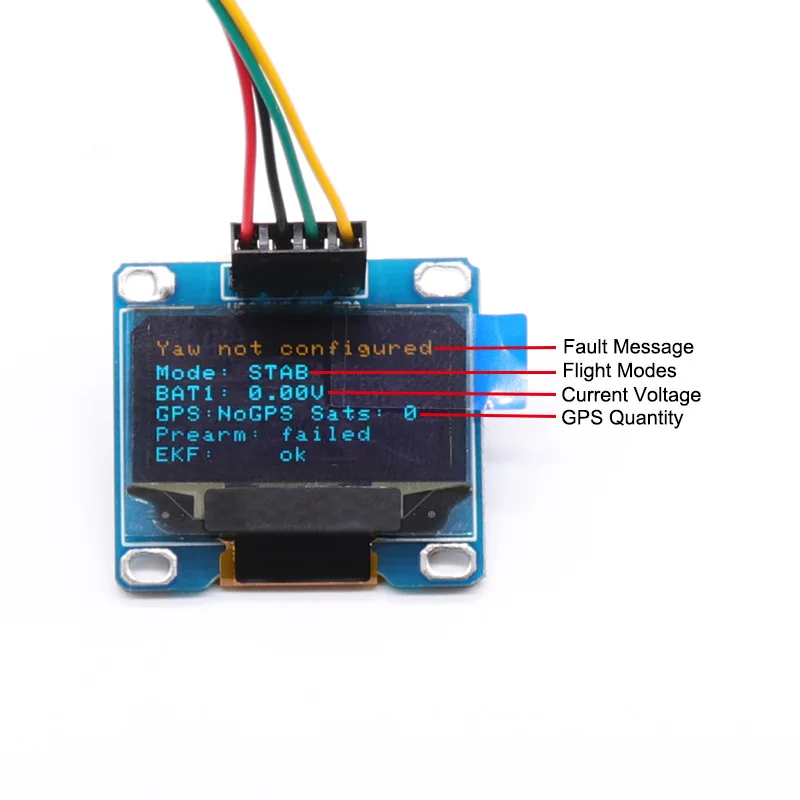
OLED 모듈은 일부 메시지를 표시 할 수 있습니다.













































 배송기간
배송기간